DL Basic : Recurrent Neural Networks
Sequential Model
- sequential model의 특징은 받아들여야 할 data의 dimension을 모름
Naive sequence model
\[p(x_t | x_{t-1}, x_{t-2}, \cdots)\]
- 과거에 있는 모든 정보를 고려함
- 고려해야할 정보량이 점차 증가함
Autogressive model
\[p(x_{t} | x_{t-1}, \cdots, x_{t-\tau})\]
- naive 모델의 조건부 데이터의 양이 너무 많아서 과거의 데이터 일부만 고려
- AR모델은 과거의 데이터 몇개를 참고하냐에 따라 이름이 바뀜
Markov model (firts-order autoregressive model)
\[p(x_{1}, \cdots, x_{T}) = p(x_{T}|x_{T-1})p(x_{T-1}|x_{T-2})\cdots p(x_2|x_1)p(x_1) = \prod_{t=1}^{T}p(x_{t}|x_{t-1})\]
- Morkov assumption을 활용한 모델
- AR모델에서 1개의 이전 데이터까지만 참고함
- 데이터의 가정으로는 말이 되긴 어려움
- 오늘 일어나는 일은 어제의 일에만 영향을 받는다.
Latent autoregressive model
\[\begin{aligned} & \hat{x} = p(x_{t}|h_{t}) \\ & h_t{} = g(h_{t-1}, x_{t-1}) \end{aligned}\]
- 과거 정보들을 한번에 사용하는 것은 어려움
- 과거 정보들을 요약해주는 $h_n$을 다음 $h_{n+1}$로 전달
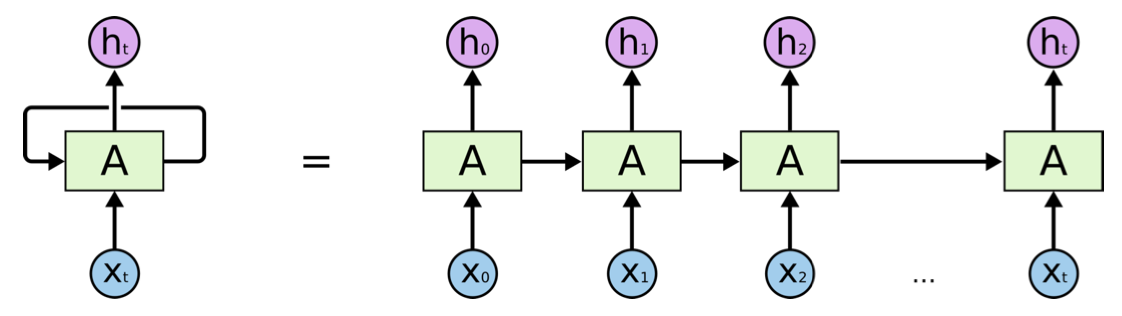
Recurrent Neural Network (RNN)
![]()
- 기본적인 구조는 MLP와 동일함
- hidden layer인 $h_{t}$는 이전 cell state에 의존함
- 대체로 왼쪽 그림처럼 표현하지만 시간순으로 펼치면 우측처럼 나타남
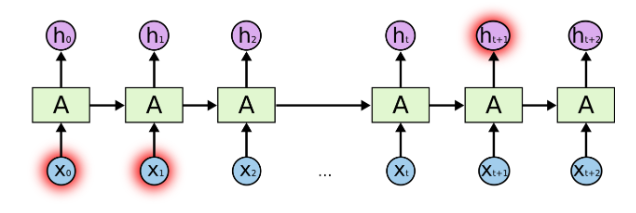
RNN의 문제점
![]()
- RNN은 연속적인 Backpropagation 때문에 과거로 갈수록 데이터의 영향력이 줄어드는 장기 의존성 (short-term dependencies)문제를 갖는다.
\[\begin{aligned} & h_{1} = \phi(W^\intercal h_0 + U^\intercal x_1) \\ & h_{2} = \phi(W^\intercal \phi(W^\intercal h_0 + U^\intercal x_1) + U^\intercal x_2) \\ & h_{3} = \phi(W^\intercal \phi(W^\intercal \phi(W^\intercal h_0 + U^\intercal x_1) + U^\intercal x_2) + U^\intercal x_3) \end{aligned}\]
- 위 수식과정에서 계속해서 weight가 곱해지면 vanishing gradient나 exploding gradient가 발생
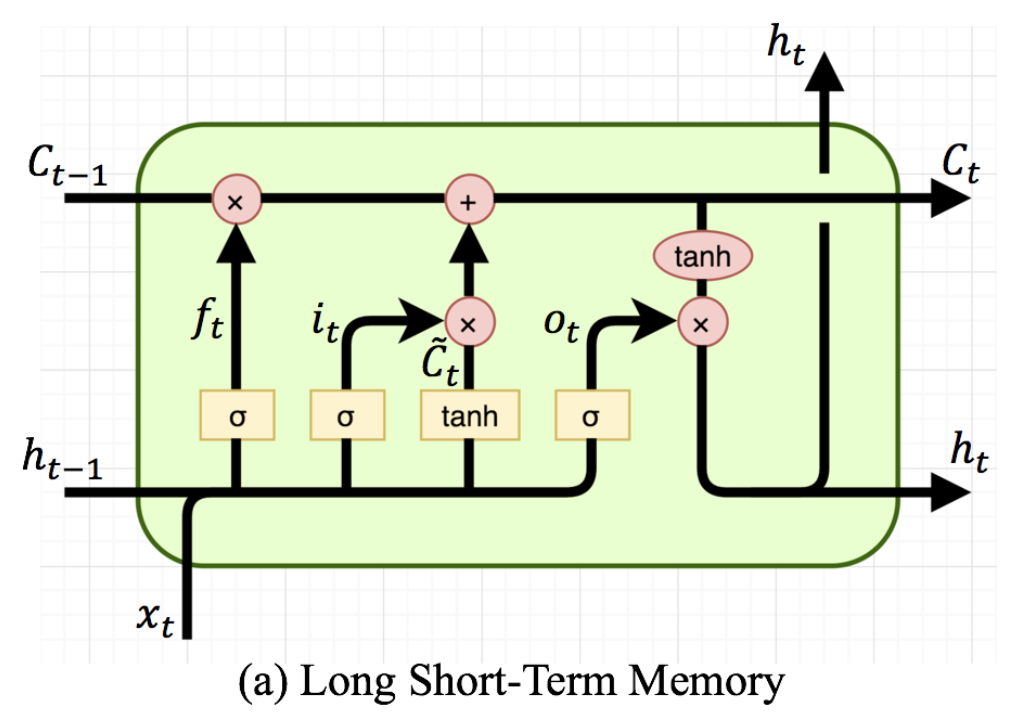
Long Shot Term Memory (LSTM)
![]()
- LSTM은 Vanila RNN의 단점인 장기 의존성 문제를 해결
- 왼쪽부터 각 $\sigma$들은 Forget gate, Input gate, Output gate를 의미
- 이전 cell state ($C_{t-1}$)와 이전의 hiddne state($h_{t-1}$)를 그대로 받아옴
- 기본 아이디어는 $C_{t-1}$에 각 gate를 통과한 정보들이 $C_{t-1}$ 정보를 업데이트
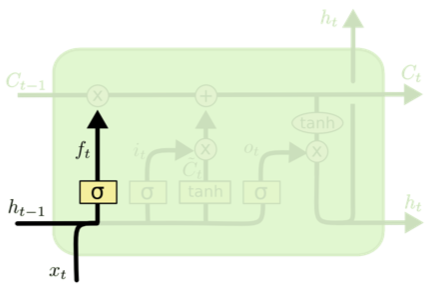
Forget Gate
![]()
\[0 \leq f_{t} = \sigma(W_{f}\cdot [h_{t-1}, x_{t}] + b_{f}) \leq 1\]
- 이전 cell state에서 버릴 것들을 선택
![]()
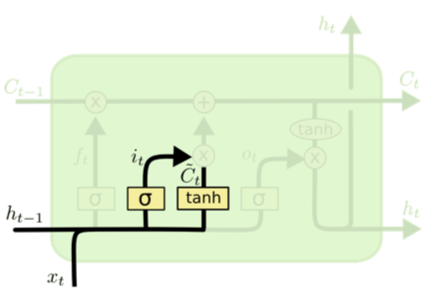
\[\begin{aligned} & i_{t} = \sigma(W_i\cdot [h_{t-1}, x_t] + b_i) \\ & \tilde{C}_{t} = \tanh(W_{C}\cdot[h_{t-1}, x_{t} + b_{C}]) \end{aligned}\]
- 앞으로 새로 들어오는 정보 중 어떤 것을 새롭게 올릴지를 결정($i_t$)
- $\tanh$이 새로운 후보값들인 $\tilde{C}_{t}$ vector를 생성하고 cell state에 더할 준비를 함
Update Cell
![]()
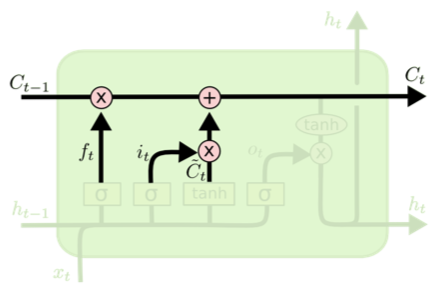
\[\begin{aligned} & i_{t} = \sigma(W_{i} \cdot [h_{t-1}, x_{t}] + b_{i}) \\ & C_{t} = f_t * c_{t-1} + i_{t} * \tilde{C}_{t} \end{aligned}\]
- 이전 state에 $f_{t}$를 곱해서 잊어버리기로 한 데이터르 잊음
- $i_t$를 통해 어떤 데이터가 들어갈지 선택하고 $\tilde{C}_t$를 곱한 input gate 결과를 합해서 새로운 cell state를 형성
Output Gate
![]()
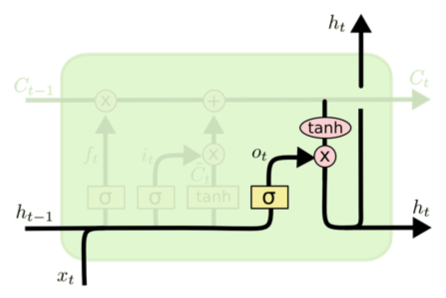
\[\begin{aligned} & o_{t} = \sigma(W_{o} [h_{t-1}, x_t] + b_{o}) \\ & h_t = o_t * \tanh(C_t) \end{aligned}\]
- 어떤 값을 내보낼지 결정함
- 시그모이드를 통해 원하는 output을 결정함
Gated Recurrent Unit (GRU)
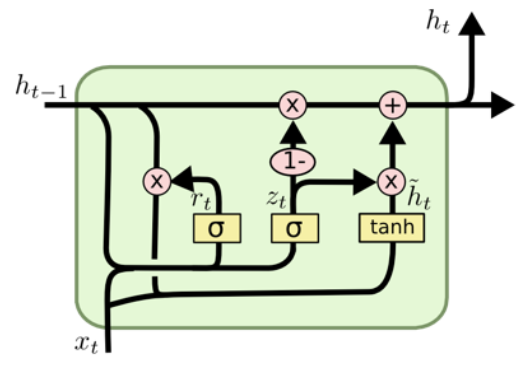
![]()
- LSTM의 변형 모델
- peephole connection을 추가하였고 일부 게이트를 변형함
- reset gete, update gate가 존재
- cell state는 없고 hidden state만 존재
- LSTM보다 파라미터 수가 적어서 더 성능이 좋음

Comments powered by Disqus.