
DL Basic : Convolutional Neural Networks
Convolution
- convolution 연산은 기본적으로 Input에 대해 커널단위로 연산을 하는 것을 의미
- 특징 추출을 목적으로 할 때 많이 사용함
- 필터(kernel)의 종류에 따라 다른 결과가 나타남
- ex) convolution filter가 3X3이고 value가 모두 1/9이면 이미지의 평균이 convolution의 output이 되어 Blur효과와 같은 결과가 나타남
$\rightarrow$ 전반적으로 기존 이미지보다 수치가 평균적으로 낮아진 것
- ex) convolution filter가 3X3이고 value가 모두 1/9이면 이미지의 평균이 convolution의 output이 되어 Blur효과와 같은 결과가 나타남
- 자세한 내용은 수학적 의미의 CNN 참고
RGB Convolution
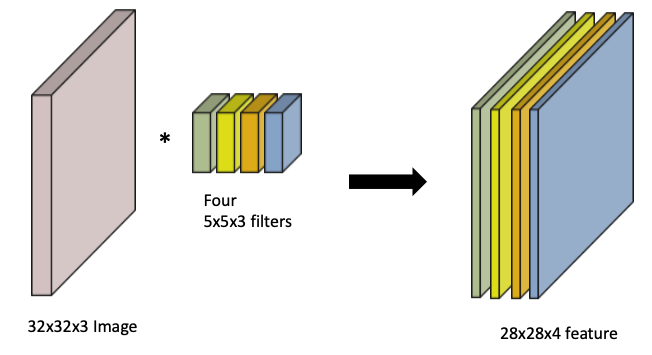
- 기본적인 convolution 연산의 원리에 따라 사용된 필터의 개수는 최종 결과의 feature scale을 결정
- 위의 사진처럼 4개의 filter를 사용하면 4개의 특징이 추출된 결과가 나타남
Stack of Convolutions
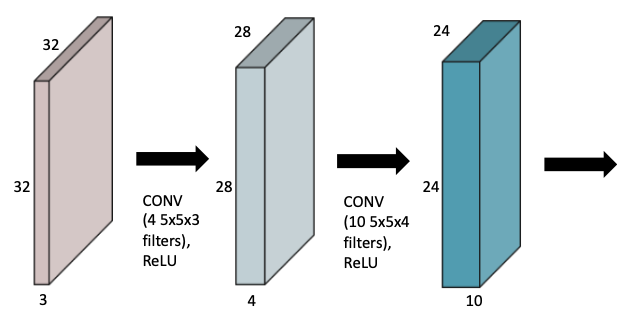
- CNN의 핵심은 파라미터 수를 줄이는 것에 있기 때문에 convoluton 연산에 사용된 전체 파라미터를 계산하는 것이 중요
Convolution Neural Networks (CNN)
- CNN은 크게 2가지 구조로 구성됨
- Convolution ans pooling layers : feature 추출
- Fully connected layer : decision making
- 최근에는 Fully connected를 없애는 추세
- Fully Connected는 dimesion에 맞춰 weight를 가지므로 parameter 수가 급격하게 증가하는 영향을 줌
- parameter 수가 증가하면 학습 난이도가 높아지고 generalization performance가 낮아짐
Stride
- stride란 kernel이 움직이는 반경을 말함
- 위의 사진에 따르면 stride는 1임
- stride에 따라 output의 크기가 달라짐
Padding
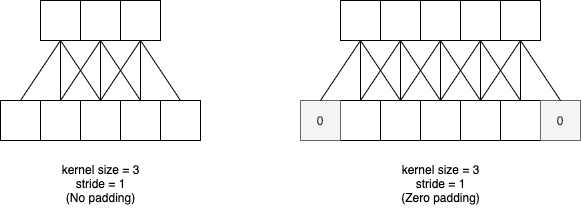
- Padding은 boundary에 버려지는 convolution 연산을 처리해주는 역할을 함
- 사진처럼 zero padding이 주어지면 input dim과 output dim을 동일하게 할 수도 있음
Convolution Parameters
- CNN의 parameter를 계산할 때 padding, stride는 고려하지 않아도 됨
- Kernel size, input channel size, output channel size를 모두 곱해주면 됨
1 X 1 Convolution
- 약간 특수한 convolution 연산
- 실제로 이미지에서 뭔가 특징을 추출하거나 하는 역할을 하지는 않음
- convolution 연산의 특성상 channel size를 바꿔주는 역할을 함
- 보통 큰 input channel을 reduction하는 과정에 사용
Modern CNN
- CNN은 시대별로 변화하는 핵심 특징은 크게 3가지가 있음
- network depth 증가
- number of parameter 감소
- performance 향상
AlexNet
- AlexNet은 CNN의 초석을 다진 모델
- Key ideas
- ReLU
- GPU implementation
- pooling
- data augmentation
- Dropout
- 지금보면 매우 당연한 것들이지만 원래 당연한걸 시작한 것들이 대단한 법인 것처럼 AlexNet은 지금의 CNN 모델의 시작이었음
- 기존의 sigmoid나 tanh와 같은 activation function의 gradient 소멸 문제를 해결하고자 ReLU를 사용함
- 한계점은 kernel에서 11 X 11을 사용했다는 점으로 영역은 넓지만 parameter를 늘리게 된다는 것
VGGNet

- VGGNet은 3 X 3 convolution filter만 사용
- Dropout은 0.5로 설정했음
- layer의 수에 따라 VGG16, VGG19로 구분
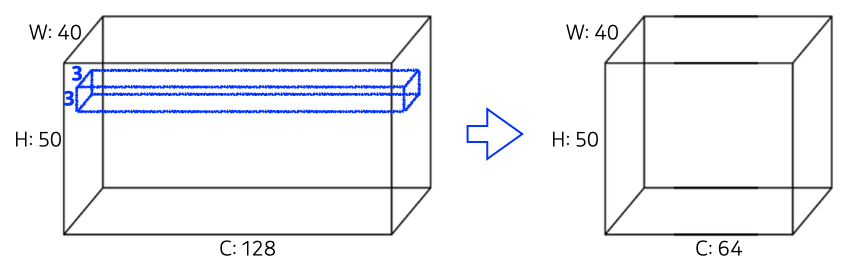
 channel size가 모두 128이라하자
channel size가 모두 128이라하자
- 3 X 3만 사용한 것은 같은 연산이라도 parameter를 더욱 줄이기 위한 방법
- 두 convolution 연산결과는 동일
- 하지만 parameter는 차이가 큼
- 3 X 3 : $3 \times 3 \times 128 + 3 \times 3 \times 128 = 294912$
- 5 X 5 : $5 \times 5 \times 128 \times 128 = 409600$
- 이는 제곱연산의 수치 증가 폭이 숫자에 비례해서 커지기 때문에 나타나는 현상
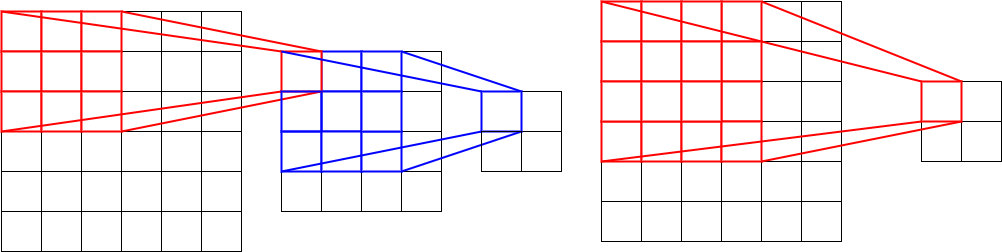
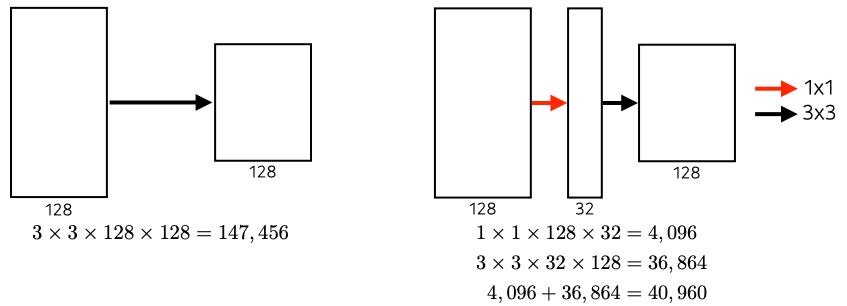
GoogLeNet

- GoogLeNet은 비슷한 네트워크가 반복되는 Networ in Network(NiN)방식을 사용
- 핵심은 NiN은 활용한 inception blocks
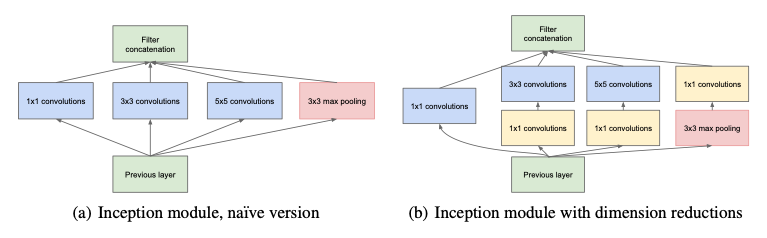
- inception block은 여러 response를 합치는 것도 있지만 핵심 역할은 parametr 수의 감소
- 앞서 1 X 1 convolution에서 설명한 아이디어를 활용
- 각 연산 앞이나 뒤에 1 X 1 Conv를 적용하여 channel의 dimension을 줄이는 방법을 활용함
ResNet
- ResNet은 딥러닝의 Deep의 가치를 높여준 모델

- Deep learning이란 이름에 맞다면 층이 깊어질수록 성능이 좋아야하는데, 실제로는 그렇지 않다는 것이 항상 문제였음
- 일정 layer 개수를 초과하면 오히려 성능이 떨어지는 결과가 나타남
- ResNet은 identity map을 통해 이를 해결함
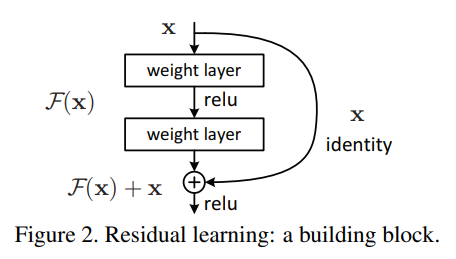
- 사실 layer의 수가 많아지면 성능이 떨어지는 이유는 Vanishung Gradient때문이었으므로 이를 해결하는 것이 목적
- 이전 층까지 학습된 결과와 추가된 레이어의 출력의 차이인 Residual만 학습하면 된다는 아이디어를 적용
DenseNet
- ResNet의 아이디어를 확장한 개념
- ResNet은 이전 층까지의 결과를 합치기 때문에 결과에 직접적인 영향을 주는 것이 문제가 될 수 있음
- 따라서 이전 측 결과를 합하는 게 아닌 concatenation, 즉 행렬적으로 값을 붙이는 방식을 활용
- 이때 channel 크기가 기하급수적으로 커지는 것을 막고자 채널 증폭 후 1X1 Conv를 활용한 dimension 감소를 반복하는 방식을 사용
Comments powered by Disqus.