
DL Basic : Optimization
Introduction
- Model 학습의 기본적인 원리는 Gradient Descent
- Gradient Descent는 1차 미분의 결과의 최적화 알고리즘
- 1차 미분 결과의 최적화는 local minimum을 찾는 것
Important Concepts in Optimization
Generalization
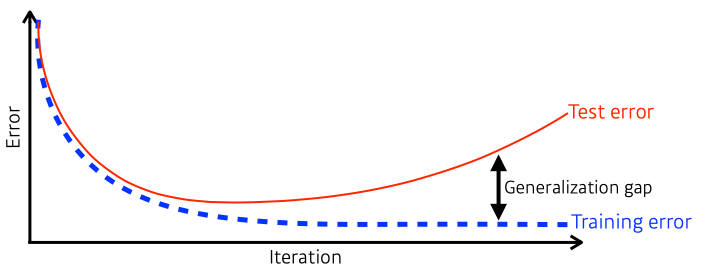
- Generalization은 모델의 성능으로 사용함
- 좋은 generalization performance는 Network의 성능이 train과 비슷한 것을 의미
- 하지만 기본적인 train set 성능이 낮으면 generalization performance가 좋아도 모델 성능 자체가 좋지 않을 수 있음
- Overfitting(과적합) 과 Underfitting을 방지하는 것이 generalization의 가장 핵심적인 포인트
Cross-validation
- K-Fold validation이라고도 함
- 학습 data가 적은 경우의 문제를 해결하고자 등장
- 전체 train data를 n등분하여 k번째 등분을 validaation data로 설정하고 n-k개의 데이터를 train으로 설정하여 학습을 하는 과정
- n개의 valid set으로 검증하는 과정과 같음
- 일반적으로 cross-validation을 통해 최적 hyper parameter를 탐색하고 최종적으로 전체 데이터로 모델을 학습함
Bias / Variance
- Variance : 유사 input에 대해 prediction이 얼마나 비슷한가?
- Bias : 전반적인 prediction이 target과 얼마나 떨어져있는가?
- 위 공식은 cost 에 대한 bias와 variance, noise의 관계성을 나타낸 것
- 공식에 따라 bias, variance, noise는 tradeoff 관계를 가짐
Booststraping
- 데이터 셋에서 subsampling을 통해 여러 데이터 셋을 형성하고 그에 맞는 여러 모델들을 만드는 기법
- 형성된 model들의 예측값들을 보고 예측의 consensus(일관성)로 전반적인 uncertainty를 판단
- 보통 앙상블(Ensemble)기법에 많이 활용됨
Bagging VS Boosting
- Bagging (Bootstrapping aggregating)
- 여러 모델들의 학습결과를 합쳐서 판단하는 방법
- 가장 좋은 결과를 선택하는 voting이나 평균치를 연산하는 averaging을 활용해서 정답을 도출
- Boosting
- 모델을 여러개 만드는 것은 동일하지만 연속적으로 연결시켜 이전에 좋지 않은 결과를 보이는 case를 집중적으로 학습함
- 여러개의 weak learner를 합쳐서 1개의 strong model을 형성
Gradient Descent Methods
- Stochastic Gradient Descent : 1번에 1개의 데이터를 활용해서 gradient를 update
- Mini-batch gradient Descent : batch-szie sample을 활용해서 gradient를 update
- Batch Gradient Descent : 전체 데이터를 활용해서 gradient를 update
- 보통 min-batch 방식이 효과가 좋은 것으로 알려져있음
Batch-Size
- batch-size를 적절히 잘 조절하는게 학습과정의 핵심
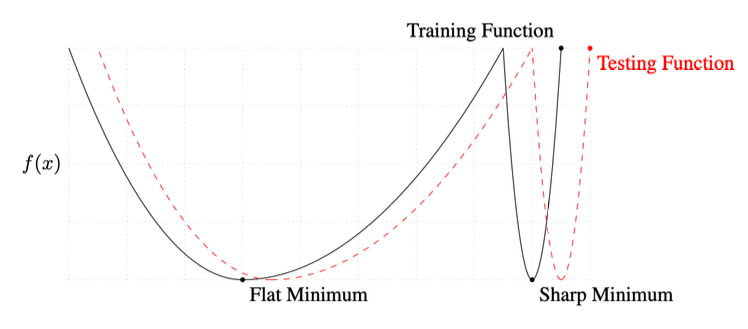
- 이때 보통 작은 batch-size가 더 효과가 좋은데, 이는 small-batch method는 flat minimizer이기 때문임
- 그림을 보면, flat minimum에서는 prediction이 target에서 벗어나도 실제 값이 큰 차이를 보이지 않음
- 하지만 sharp minumum은 prediction이 약간만 벗어나도 매우 큰 오차를 갖게되는 것을 볼 수 있음
Gradient Descent & Momentum
\[\begin{aligned} W_{t+1} \leftarrow W_{t} - \eta g_{t} \end{aligned}\]- $\eta$ : learning rate
- $g_{t}$ : gradient
- 일반적으로 알고있는 gradient descent
- $a_{t+1}$ : accumulation
- $\beta$ : momentum
- momentum의 역할은 진행한 gradient의 방향을 유지해주는 역할
- 수식을 보면 이전의 학습결과에 momentum을 처리해서 반영
- 학습을 하다보면 batch에 따라 oscillation의 형태로 gradient가 움직이는 경우가 있는데, 이때 momentum이 적용되면 이를 어느정도 보완해줄 수 있음
Nestrov Accelerated Gradient (NAG)
\[\begin{aligned} & a_{t+1} \leftarrow \beta a_{t} + \nabla\mathcal{L}(W_{t} - \eta\beta a_{t}) \\ & W_{t+1} \leftarrow W_{t} - \eta a_{t+1} \end{aligned}\]- $\nabla\mathcal{L}(W_{t} - \eta\beta a_{t})$ : Lookahead gradient
- NAG는 momentum의 최적값을 지나치는 문제를 방지하는 목적을 갖고 있음
- lookahead gradient는 momentum에의해 이동하는 곳에서 gradient를 계산하여 적용한 것
Adagrad
\[\begin{aligned} W_{t+1} = W_t - \frac{\eta}{\sqrt{G_{t} + \epsilon}} g_{t} \end{aligned}\]- $G_{t}$ : Sum of gradient squares
- $\epsilon$ : for numerical stability
- Adagrad의 핵심 아이디어는 learning rate를 건드린다는 것
- $G_{t}$에 이전 gradient들의 제곱이 누적되기 때문에 많이 변화한 parameter의 학습률을 낮추고 적게 변화한 parameter의 학습률을 높이는 방식을 선택
- $\epsilon$은 0으로 나누는 것을 방지하는 상수
- Adagrad는 $G_{t}$가 너무 커지면 더 이상 학습이 일어나지 않는 문제가 발생
Adadelta
\[\begin{aligned} G_t = \gamma G_{t-1} + (1-\gamma)g_{t}^2 \\ W_{t+1} = W_{t} - \frac{\sqrt{H_{t-1} + \epsilon}}{\sqrt{G_{t}+\epsilon}}g_t \\ H_t = \gamma H_{t-1} + (1-\gamma)(\Delta W_t)^2 \end{aligned}\]- $G_t$ : EMA of gradient squares
- $H_t$ : EMA of differentce squares
- Adadelta에서 $G_t$와 $H_t$는 $\gamma$가 recursive한 값으로 영향을 주므로 time의 영향을 받게 적용함 (Exponential Moving Average)
RMSprop
\[\begin{aligned} G_t = \gamma G_{t-1} + (1-\gamma)g_{t}^2 \\ W_{t+1} = W_{t} - \frac{\eta}{\sqrt{G_{t}+\epsilon}}g_t \end{aligned}\]- RMSprop은 공식적으로 출판한 내용은 없고 그냥 이런식으로 하니 잘 되었다~ 라는 식으로 등장
- 이전에 Adagrad는 stepsize가 없었는데, 이를 수정하여 stepsize를 적용함
Adam
\(m_t = \beta_1 m_{t=1} + (1-\beta_1)g_t \\ v_t = \beta_@ v_{t-1} + (1-\beta_2)g_t^2 \\ W_{t+1} = W_t - \frac{\eta}{\sqrt{v_t + \epsilon}}\frac{\sqrt{1-\beta_2^t}}{1-\beta_1^t}m_t\)
- $m_t$ : momentum
- $v_t$ : EMA of gradient squares
- $\frac{\sqrt{1-\beta_2^t}}{1-\beta_1^t}$ : unbiased estimator
- Adam은 momentum에 RMSprop 개념이 합쳐진 방식
- 단, 연산에서 지수평균을 사용
Regularization
Early Stopping
- test set을 활용해 학습을 하는 것은 cheating이므로 valid set의 결과를 활용해 특정 metric 조건에 맞춰 학습을 조기멈춤하는 것
Parameter Norm Penalty
\[\text{total cost} = \text{loss}(\mathcal{D}; W) + \frac{\alpha}{2}\lVert W \rVert_2^2\]- weight decay라고도 함
- parameter 폭발을 방지하는 것이 목적임
Data Augmentation
- 주어진 데이터의 방향 혹은 거울상과 같은 다양한 변형을 취하는 것을 의미
- 더 많은 데이터셋을 위해 자주 사용
- 이미지 분류 문제에서 많이 사용
Noise Robustness
- input이나 weight에 노이즈를 추가하는 것
Label smoothing
- Mix-up, CutMix같은 방식을 통새 label의 decision boundary 처리를 도와주는 것
- 이미지 처리를 할 때 두 개의 label을 섞은 이미지를 사용하는 Mixup이나 일부를 잘라서 하비는 cutmix 데이터를 활용하면 더 좋은 학습 성능을 보이기도 함
Dropout
- forward 과정에서 일정 확률로 랜덤하게 neuron의 연결 가중치를 0으로 설정하는 것
- 1개의 모델 구조에서 뉴런 구성을 변경하기 때문에 마치 여러개의 모델을 학습하는 것과 같은 효과를 가짐
Batch Normalization
\[\begin{aligned} & \mu_{B} = \frac{1}{m}\sum_{i=1}^m x_i \\ & \sigma^2_{B} = \frac{1}{m}\sum_{i=1}^m (x_i - \mu_{B})^2 \\ & \hat{x}_i = \frac{x_i - \mu_{B}}{\sqrt{\sigma^2_{B}+\epsilon}} \end{aligned}\]- Batch 정규화는 Gradient Vanishing/Exploding 문제를 해결하고자 등장
- 각 배치별로 데이터를 정규화하여 0 ~ 1의 수치로 조정
Comments powered by Disqus.